


无人机(unmanned aerial vehicle, UAV)技术的飞速发展正推动低空经济(low altitude economy, LAE)迈向智能化、协同化的全新阶段。作为从传统飞行工具向智能体演进的核心载体,无人机凭借人工智能、计算机视觉和深度学习技术,在自主飞行、精准导航和复杂环境适应能力上实现突破,赋能智慧物流、无人化农业和城市空中交通等关键领域,快速融入LAE的产业链。更为重要的是,无人机集群技术的成熟,通过群体智能和高效协同,推动LAE从单点应用向多维度场景扩展,形成贯通空中物流网络、灾害应急体系和智能城市管理的新模式。这种“技术-产业”双向驱动,不仅提升了LAE的效率和附加值,还使其具备更强的系统性和战略意义[1-4]。然而,随着LAE规模化发展,空域安全、隐私保护及规则体系建设成为必须解决的核心难题。以无人机为切入点,正通过空域管理改革、标准化建设和政策创新,构建高度协同的技术与管理生态体系。无人机与LAE的深度融合,正在推动产业从技术驱动迈向生态构建,成为智能飞行领域的全新增长极,重塑未来经济和产业格局。
2024年,无人机正从“战场工具”跃升为“智能战术节点”,引领信息化战争进入全新维度。以集群作战为核心,无人机通过自主识别威胁、实时调整战术、协同执行侦察、精准打击和电子战任务,展现出如蜂群般的灵活性和智能化优势,大幅提升了作战效率与战场适应力。这种集群化智能不仅重塑了作战模式,也使无人机成为战场情报共享与战术协同的关键枢纽[5-7]。与此同时,反无人机技术的发展加剧了攻防对抗的动态博弈,电子干扰、激光拦截和动能打击构建起多层次防御体系[8],将无人机作战推向复杂化与高对抗性的深水区。未来,无人机将深度嵌入全球军事网络,承担从战略情报采集到决策支持、战术执行的全链条任务,推动智能化战争从体系作战向网络化、智能化的深层演进,重新定义全球安全格局与战场规则。
本文系统回顾了2024年无人机领域的代表性技术突破和行业进展,分析了关键技术的飞跃性进展与未来发展趋势。
1 无人机自主飞行与智能控制
无人机在自主飞行与智能控制领域的突破,正引领其应用进入一个全新的智能化时代。自主导航与路径规划技术赋予了无人机在复杂环境中精准飞行与实时避障的能力,极大提升了其操作的安全性和高效性;智能控制与决策制定技术使无人机能够基于实时数据自主优化飞行策略,确保任务的高效完成;而自适应飞行与多任务协作则赋予无人机在动态、多变任务中的高度灵活性与协同能力。这些创新性技术的融合与进步,不仅推动了无人机自主性和任务执行效率的提升,更为其在复杂应用场景中的广泛应用奠定了坚实基础。
1.1 航路规划与自主导航
在无人机自主导航领域,针对复杂未知环境的高效探索与决策,不同研究路径展现了各自的优势与侧重。Zhao等[11]通过引入相机替代传统雷达,结合位置与偏航的混合行动空间,有效突破了视野受限的瓶颈,同时借助无效动作掩蔽机制与自回归网络模型,显著提升了导航效率与决策速度,实验与物理模拟验证了其在实际应用中的稳定性与可靠性。然而,该方法的核心侧重点在于单机任务的高效执行与快速响应。然而,效率并非唯一目标,Yue等[12]对动态目标与复杂障碍环境,融合语义感知与时间-空间注意机制,赋予无人机更强的自主探索与无碰撞导航能力,展现出卓越的自适应性与可移植性,能够在不同任务与场景变化中保持稳定性能。两者在技术侧重上形成鲜明对比:前者聚焦于决策速度与任务效率的最优解,而后者则强调环境适应与泛化能力的全面提升,为无人机自主导航的高效性与智能化提供了互补性的技术支撑。
1.2 智能控制与决策制定
无人机智能控制的飞跃正让它们从“任务执行者”转变为“自主决策者”,而这一转变背后的驱动力,正是智能算法和控制技术的深度融合。强化学习,作为无人机决策能力提升的核心工具,已展现出强大的适应性和灵活性。Wang等[15]将重播记忆数据存储机制与优化后的强化学习模型结合,显著提升了无人机在雷达失效、通信中断条件下的自主导航与避障能力。相比传统方法,这一改进通过两阶段训练策略强化了环境适应性,有效缩短了训练与再训练时间,同时在复杂场景中实现了更高效的决策响应与路径调整,展现出卓越的动态避障性能。类似地,在群体近程空战场景下,段海滨团队[16]的多智能体强化学习方法,通过优化竞争,为无人机在信息快速变化下提供了更加精准的机动策略。这些研究的共性在于强化学习对动态环境的适应性,而差异则体现在任务需求上的特化应用——从个体路径优化到群体决策对抗。
1.3 自适应飞行与可持续发展
无人机的飞行不再仅是对环境的被动适应,而是逐步演变为一种主动学习与自主决策的能力。这种能力的提升,依赖于自适应控制与智能算法的深度融合。Hu等[21]基于自适应滑模控制方法,突破了传统控制对外部扰动的局限性,通过动态调整控制参数,使无人机在风速变化、负载波动等复杂条件下保持飞行稳定性。相较于Hu等[21]的扰动补偿,Ou等[22]进一步结合深度强化学习与自适应控制技术,通过实时环境评估与策略优化,使无人机能够自主应对复杂障碍和动态环境。这些研究都表明,自适应控制的核心在于环境变化的动态感知与响应,而差异则体现在对复杂环境中不同因素的优化侧重,例如外部扰动补偿和策略动态调整的相辅相成,为自适应飞行提供了更加坚实的技术支撑。
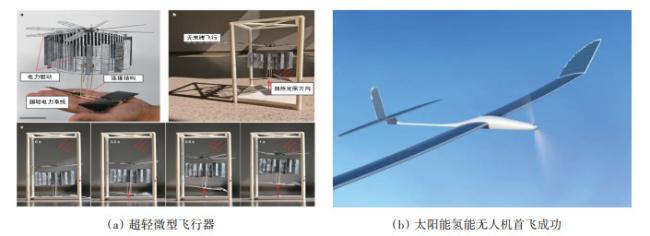
无人机技术的突破不仅局限于算法和控制策略,更在于硬件技术的革新为其赋能。Shen等[23]通过环境能量收集技术,将太阳能与风能等自然能源引入无人机领域,突破了传统电池的续航限制(图 1(a)),为长时间任务如环境监测和灾害预警提供了新的技术可能。进一步结合能源复合系统的太阳能氢能无人机[24],通过太阳能驱动氢燃料电池(图 1(b)),将续航能力推向全新高度。与此同时,基于边缘计算的协作框架为多机合作提供了更为灵活的数据处理能力,Wang等[25]通过多视角互补性设计精准轨迹预测,解决了通信受限条件下的协同问题。这些硬件与系统创新共同指向一个核心趋势,即在能源与计算能力双重驱动下,无人机正向更加智能化、可持续化的技术生态迈进,为未来复杂场景任务提供了更广阔的应用前景。
2 无人机集群协同控制
2.1 无人机多机协同
多机协同飞行的未来正在被重新定义,其核心是对飞行控制与任务协作的全新理解。从竞速飞行到复杂任务的精确执行,无人机正在以超越人类飞手的速度与精度完成任务。苏黎世大学通过优化竞速飞行控制算法,将第一视角图像直接转化为控制信号,实现了媲美甚至超越人类飞手的飞行策略。这不仅提升了无人机的任务灵活性,更通过安全性约束确保了高风险任务的可控性[26]。而Krinner等[27]通过碰撞锥模型引入控制障碍函数,使无人机能够在密集障碍环境中安全快速飞行,与此同时,Qiu等[28]的自适应课程学习方法解决了无人机在狭窄环境中的高成功率穿越问题。固定翼无人机的研究也不甘示弱,强化学习方法在姿态控制中的应用初现成果,这些技术在解决飞行控制复杂性和环境适应性方面达到了新的高度。
与此同时,无人机集群任务规划在智能化的道路上走得更远,以自然界的协作模式为灵感的研究成为亮点。Deng等[31]受生物行为启发,设计了一种基于方位刚度的目标包围策略,通过结合轴承刚度框架与仿生设计,实现了静态和动态目标的高效围捕。这一策略不仅保持了目标包围的稳定性,还为任务优先级的动态调度提供了算法支持,大幅提升了群体任务的整体执行效率。从任务分配到目标围捕,这些研究的共同特性在于对无人机群体的智能化协同需求,而其差异则在于应用场景的具体化。未来,无人机集群将在更复杂任务与广泛应用场景中展现更强的适应性与协作能力,进一步推动无人机技术走向智能化的新高地。
2.2 无人机自主飞行跟踪控制
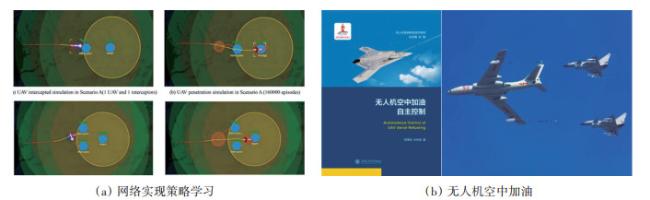
无人机的群体智能不仅依赖于单机控制的精准性,更需要协同路径规划与集群控制的深度配合。在三维空间编队方面,Huo等[36]的簇空间指令控制方法,通过实时信息共享与任务动态调整,使无人机能够在复杂环境中保持精准的队形转换。这一成果与Wei等[37]基于非线性控制理论的轨迹跟踪方法形成了强有力的技术互补,后者通过精准建模无人机的非线性特性,实现了对快速动态目标的高效跟踪。此外,Duan等[38]基于仿生视觉导航的无人机对接精准控制方法,在复杂环境中的抗干扰能力表现尤为突出(图 2(b)),有效解决了多风干扰导致的位置偏移问题。这些研究表明,单机性能与群体协作正在逐步融合,从而推动无人机技术向更加智能化与系统化的方向发展,为多无人机系统在复杂任务中的全面应用提供了坚实基础。
2.3 多模态感知与数据融合
无人机的“感知能力”正演变为其智能化的核心驱动力,而多模态感知与数据融合技术为这一关键能力提供了坚实的技术支撑。单一传感器的局限性在复杂动态环境中愈发明显,而视觉与激光雷达的深度融合无疑是这一领域的重要突破方向。Baya等[39]通过卷积神经网络结合激光雷达数据,大幅提升了无人机在动态障碍物识别与跟踪中的表现,这一方法使无人机能够在高度动态环境中保持飞行安全性(图 3(a))。同时,Ullah等[40]进一步优化了视觉与激光雷达融合策略,利用卡尔曼滤波技术在强光照和低光照条件下提升感知精度,两者的研究均体现了多模态融合在感知精度和鲁棒性上的巨大潜力,但侧重点从动态障碍识别延伸到多环境适应,为复杂任务的多样化需求提供了更广泛的支持。
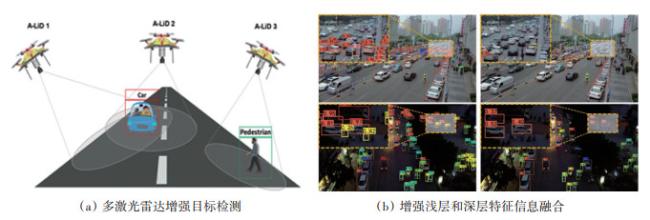
如果感知是无人机在复杂环境中“看得清楚”的能力,那么数据融合则是“看得精准”的关键。Xu等[41]开发的多模态神经网络融合框架,通过集成惯性测量单元(inertial measurement unit,IMU)、全球定位系统(global positioning system,GPS)、视觉和激光雷达数据,实时更新环境模型并优化路径规划,尤其在复杂地形下表现出了卓越的适应性。该成果与Jiang等[42]针对低能见度场景开发的红外与视觉多尺度融合算法形成了互补,前者通过环境模型更新提升无人机的路径优化能力(图 3(b)),而后者则专注于特殊场景中的感知与检测。这些研究共同表明,多模态感知的核心在于数据的高效整合,而差异性则体现在特定场景中的应用优化,为无人机的多任务执行奠定了坚实基础。
随着自主导航需求的提升,同步定位与地图构建(simultaneous localization and mapping,SLAM)与多模态数据融合的结合正推动无人机迈向更高精度的环境建模与定位能力。Lü等[43]基于视觉与激光雷达数据融合的SLAM算法,通过精准的地图构建与定位,显著提升了无人机在未知环境中的自主性。而Xin等[44]通过分布式多传感器协同感知算法,使得不同无人机间能够实时共享信息并协同决策,这不仅提升了大规模任务的执行效率,还降低了数据传输的延迟。这些研究共同预示着无人机技术正朝向多传感器融合与高效协作的方向持续推进,为应对更加复杂和广泛的应用场景提供了前瞻性的解决方案,同时也为未来无人机在灾后搜救、城市勘探等领域的应用指明了明确的技术发展路径。
2.4 无人机大模型感知
无人机的视觉任务正在经历一场从“任务专属”到“泛化统一”的技术变革。传统为单一任务设计特定算法的模式,因其复用性和灵活性不足,难以适应复杂多变的环境需求。而大语言模型的引入,为这一领域注入了全新的思路。Kuckreja等[45]的研究展示了大语言模型如何通过对比鱼眼图像预训练(contrastive language-image pre-training,CLIP)特征提取与多层感知机对特征进行对齐,将目标检测、场景分类和视觉问答统一在一个框架中。这种整合使得视觉任务从“孤岛”走向“协作”,在复杂场景中展现了跨任务执行的高效性。同样地,Muhtar等[46]在遥感图像处理领域的成果,不仅实现了图像描述的自动生成,还通过多模态推理提升了目标识别与位置推断的能力。这些研究共同表明,大语言模型在无人机视觉任务中的应用,正在从单任务优化向多任务融合迈进,突破了算法孤立和场景限制的传统瓶颈。
如果说单一任务的整合提升了无人机视觉系统的适应性,那么多模态数据与大语言模型的结合,则进一步推动了复杂场景下的智能化应用。Zhang等[47]的多传感器数据融合模型,结合光学、雷达和红外图像,系统整合场景分类、目标检测和视觉定位,展现了无人机在多模态图像理解中的卓越能力。这种融合不仅增强了复杂环境中的感知精度,也为遥感和智能监测提供了全新的技术方案。在更复杂的应用中,Bucker等[48]通过几何特征编码和传感器融合,将大语言模型用于飞行轨迹的动态调整,实现了任务执行的精准化和灵活性。无论是多模态数据的集成还是飞行任务的动态优化,这些研究的共同点在于通过大语言模型打破传感器数据孤立,形成跨领域的协作能力。
在无人机任务规划与自主决策领域,大语言模型展现出了前所未有的潜力。Zhong等[49]利用生成式预训练变换器(generative pre-trained transformer, GPT),将自然语言指令直接转化为任务规划和导航路径,使无人机能够灵活响应复杂环境中的实时变化。更进一步,Tagliabue等[50]将大语言模型嵌入到无人机的规划控制反馈系统中,通过动态生成控制提示和调用最优应用程序接口(application programming interface, API),实现了对无人机的精准控制与任务执行。这些研究共同证明,大语言模型不仅是视觉任务的整合工具,更是多任务协作和复杂场景中自主决策的核心驱动。随着大语言模型与无人机技术的深度融合,未来的无人机视觉系统将具备更为卓越的适应性与智能化能力,推动技术从场景优化向真正的场景泛化发展,为更广泛的实际应用奠定坚实基础。
2.5 无人机实时飞行优化
无人机自主飞行技术正逐步迈向高度智能化与高效化的发展新阶段,而边缘计算作为其核心支撑技术,为这一转型奠定了坚实的技术基础与保障。传统云计算因其传输延迟和带宽瓶颈,往往难以满足无人机在动态环境中的实时性需求,而边缘计算通过将计算任务下沉至本地,有效地改变了这一局面。Fan等[51]通过边缘计算优化路径规划,在复杂环境中显著减少了延迟,使无人机在飞行稳定性和任务可靠性上实现了质的飞跃。与此相呼应,Johnsen等[52]的自主导航框架通过高效的本地计算,在动态障碍物避让与路径修正中表现出卓越的响应速度和安全性。这些研究共同表明,边缘计算为无人机的自主飞行注入了灵活与精准的特质,不仅提升了实时决策能力,更为无人机适应复杂任务环境提供了可能。
3 无人机集群验证
无人机集群正重新定义多机协作的边界,成为智能飞行领域的创新高地。在集群协作与控制算法的突破中,深度强化学习展现出了强大的适应性与高效性。Kong等[57]通过动态任务分配与路径优化,赋予无人机集群在复杂环境中实时调整的能力,不仅显著提高了协同作业效率,还在应对突发干扰与设备故障时表现出卓越的鲁棒性。
这一技术的核心优势在于将单机的动态响应能力拓展为集群的协同智慧,而这一点在多轮模拟与实地测试中得到了充分验证。与此同时,集群控制的另一关键问题——通信延迟的挑战,正通过第五代移动通信(5G)技术得以有效缓解。Fan等[58]基于5G的集群通信模型,不仅实现了低延迟的信息传输,还在高密度集群中展现了对复杂干扰的优越适应能力。这些研究共同表明,在复杂场景下,无人机集群技术正在从单机响应向多机协作转型。
协作是无人机集群的灵魂,而任务分配与自适应飞行则为集群赋予了高效执行任务的能力。这一智能协同能力的实现,在青少年无人机大赛(Fly to Future,FTF)等赛事中得到了生动体现。FTF赛项聚焦任务飞行、货物搬运等复杂应用场景,融合多种前沿技术手段,验证了无人机在精确操控与协同作业中的潜力,为集群技术的实际应用提供了实践支持[59]。这一理念同样在其他领域的智能协同竞赛中得到了进一步验证。2024年国际大学生机器人大赛设立竞速赛与障碍赛两大赛项,汇集了10支仿生足式机器人队伍参赛,清华大学等国际顶尖队伍参与交流,全面展示了多机协同系统在复杂环境下的高效任务执行与精准控制能力。这些赛事不仅推动了多机协同技术的实用化发展,还通过实战检验了动态任务分配与环境自适应等关键技术的先进性与可靠性[60]。


4 反无人机技术
识别技术的突破正在赋予反无人机系统更强的智能化属性。Qian等[65]结合快速区域卷积神经网络(faster region convolutional neural network,Faster RCNN)和掩码区域卷积神经网络(mask region convolutional neural network, Mask R-CNN)的多维度目标识别框架,不仅解决了复杂背景下的无人机识别问题,还通过深度模型的融合提高了系统对无人机特征的提取效率。同样,Mowafaq等[66]通过飞行特征的行为分析方法,将飞行轨迹与速度信息结合,进一步提升了动态环境中敌我目标的识别精度。这些技术的核心特征在于依托人工智能,实现高效的数据挖掘与整合,体现了前沿科技的创新与突破,而它们的差异化则体现在针对不同场景的优化设计上,从高动态环境到复杂背景,无不展现出识别技术的广泛适应性。
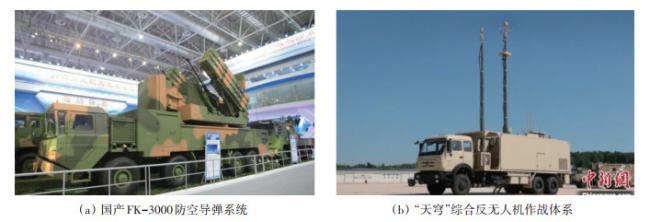
现代化防空系统进一步推动了反无人机技术的全域覆盖能力。国产FK-3000防空导弹系统以其多目标打击能力和高机动性[69](图 7(a)),在复杂战场环境中展现出无人机防御的精准性,而“天穹”综合防御体系通过全空域覆盖与激光拦截技术[70],为大规模无人机威胁提供系统级解决方案(图 7(b))。这些研究在提升无人机防御能力的同时,也通过全新技术的引入开辟了未来反无人机作战的潜在方向,例如,Raytheon的C-UAS集成系统[71]和Lockheed的ATHENA激光武器系统[72],均通过高能打击与全天候作战能力展现技术前瞻性。从便携设备到大规模防御体系,这些技术的共同驱动点在于高精度与多样化的目标覆盖,而差异则在于对特定任务场景的适配能力。
5 无人机管控与低空经济
5.1 飞行安全与空域管理
随着无人机技术的快速发展,2024年全球无人机管控政策进一步严格,推出了一系列前瞻性法规,主要集中在飞行安全和空域管理方面。中国于2024年1月1日实施的《无人驾驶航空器飞行管理暂行条例》明确了飞行员资质认证、无人机注册和飞行安全要求,并规定无人机运营商在飞行过程中必须遵循特定的空域划分与飞行路径,避免进入禁飞区或敏感区域[73]。此外,欧洲在2024年进一步强调《USpace空域管理框架》,通过数字化技术和自动化空域管理系统,实现无人机与传统航空器的空域协作,减少空域冲突风险,特别是在城市空域和机场周围的高密度飞行环境中[74]。该系列政策旨在确保飞行安全与空域的高效利用,通过引入智能化空域管理和先进的监管机制,为无人机的广泛应用提供坚实保障和前瞻性支持。
5.2 隐私保护与飞行认证
数据隐私保护和飞行员资质认证成为2024年无人机法规的另一大重点。随着无人机在公共和敏感区域的应用,隐私保护问题日益突出。欧盟加强了无人机飞行中的隐私保护规定,要求所有超过250 g的无人机配备远程身份系统(remote identification system,RID),实时传输飞行位置信息、飞行高度、速度等数据,以提高飞行透明度,保护公众隐私[75-76]。此外,巴西推出了《无人机隐私保护法案》,要求无人机在采集数据时必须获得授权,确保数据不被滥用。在飞行员资质认证方面,美国联邦航空管理局(federal aviation administration,FAA)和中国民航局分别加强了飞行员认证要求。美国联邦航空管理局推行了《无人机操作员资格认证规则》,要求商用无人机操作员必须通过认证考试并接受定期培训[76]。中国民航局也提升了无人机制造和操作的监管标准,确保飞行系统在复杂环境中稳定运行,并要求飞行数据的详细记录与上传。这些措施有助于提高飞行安全性和公众对无人机技术的信任,为行业的可持续发展奠定法律基础[77]。
5.3 低空经济

地方实践进一步强化了LAE发展的战略方向,并通过多地协同探索取得显著成效。重庆市发布《推动低空空域管理改革促进低空经济高质量发展行动方案(2024—2027年)》,率先试点空域资源市场化管理,提出到2025年新建通航起降点200个以上,构建覆盖全市的“县县通”低空飞行网络[79],为空域资源的高效配置与合理利用提供了先行示范,同时缓解了空域管理分散、效率低下的行业瓶颈。金华市则通过建设低空航路和完善通用机场网络,为LAE的场景落地提供了重要的硬件支撑,进一步推动LAE从政策规划走向实际应用。汕头市南澳县成功举办无人驾驶低空观光首航仪式,成为粤东地区首个落地的无人驾驶飞行器项目,标志着LAE正向智能化与应用场景多元化迈进,为区域经济与文旅产业发展注入了新的活力。这些实践充分体现了地方政策与技术应用联动推动产业升级的显著成效。
技术突破为LAE注入核心驱动力。飞行汽车(electric vertical take-off and landing aircraft,EVTOL)和无人机技术取得突破(图 8(b)),尤其是EVTOL在城市空中交通中的试验应用,为未来智慧交通体系奠定了基础,并推动LAE从单一飞行应用向高附加值、多场景方向扩展。然而,行业仍面临空域管理政策滞后及标准体系不健全的挑战,导致全国范围的资源协同和规则统一性不足,成为制约LAE高质量发展的主要瓶颈。未来需加速空域改革、标准化建设和全国生态体系构建,实现技术、政策与市场的深度融合,全面释放LAE在智能交通与产业升级中的潜力,引领全球产业新格局。
6 结论
本文系统回顾了2024年无人机技术在军民两用领域的前沿发展,重点聚焦于无人机管控与低空经济、无人机自主飞行控制、无人机集群协同、无人机集群验证及反无人机技术等关键方向。相关研究在多方面取得突破性进展,有效提升了无人机在复杂动态环境中的飞行稳定性与任务执行精度,同时显著增强了多无人机系统的协同作业能力与执行效率。2024年的研究成果为无人机技术的规模化应用与跨领域拓展奠定了坚实的理论与实践基础。伴随着无人机技术在各个方面的持续推进,无人机技术必将迈向一个崭新的台阶。







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}