


1 光驱动微纳马达运动机理
光驱动微纳马达的运动机理主要涉及3种效应:光热效应、光致异构化和光催化分解。每种效应都通过独特的物理和化学机制将光能转化为机械能,进而驱动微纳马达的运动。这些效应在不同应用场景下展现出各自独特的优势和适用性。
1.1 光热效应
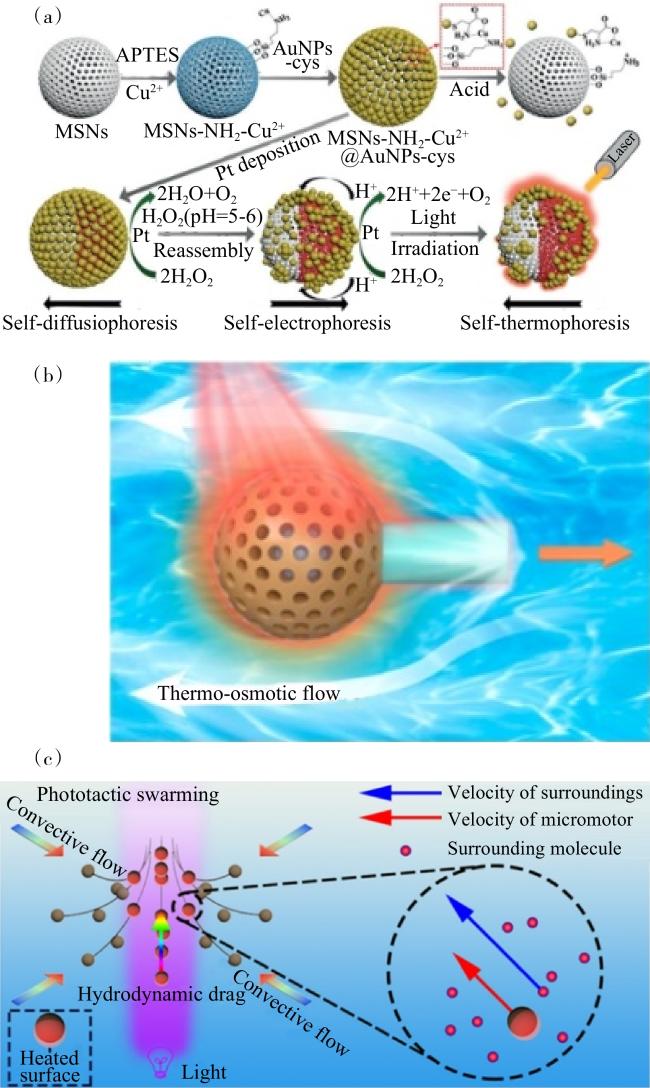
利用光热效应的光驱动微纳马达是马达将吸收的光能转化为热能,导致马达表面产生温度梯度或周围介质物性变化而产生运动的一类马达。这类马达通常需要将具有良好光热效应的材料(如金、碳材料等)设计于马达表面[4]。如图1(a)[5]所示,Lin等[5]将金纳米粒子不对称分布于纳米颗粒表面制备了纳米马达,在近红外光照射下金表面发生等离激元共振效应,光能转换为热能,在马达周围产生温度梯度,使马达在热泳力作用下向温度较低一侧移动。Liu等[6]设计了一种呈不对称火柴棍状结构的纳米马达,该马达以介孔碳为核心材料,巧妙替代了传统的金纳米粒子,如图1(b)[6]所示,在近红外光照射下,介孔碳吸收近红外光,产生温度梯度,使马达产生自热泳。Hu等[7]将光热Fe3O4纳米粒子沉积于聚合物颗粒表面制备了微米马达,如图1(c)[7]所示,在紫外光照射下,马达的运动速度高达270 μm/s,其原因是马达表面产生的热量降低了溶液的局部密度,产生了热对流。光热效应驱动微纳马达能将光能有效地转换为热能,进而转化为机械运动,在生物医学、环境监测、微流控系统等领域展现出了巨大潜力,但需要兼顾高性能光热材料所带来的微纳马达成本增加和局部温度升高可能导致的热损伤问题。
1.2 光致异构化
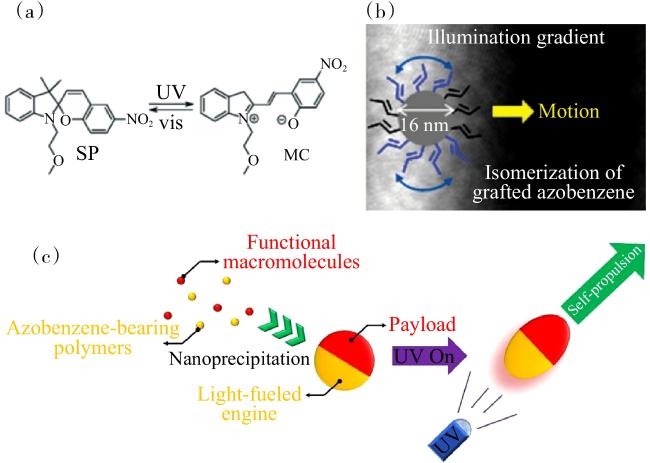
光致异构化是指分子在光照条件下,分子内部的化学键重新排列,导致结构发生弯曲、伸展或收缩等现象。典型的光异构分子是偶氮苯和螺吡喃等衍生物,如偶氮苯有顺式和反式两种异构体,能够在紫外光和可见光交替照射下发生可逆的反−顺−反构型转换[8],如图2(a)[8]所示,利用这类衍生物所组装的微纳马达,可通过光的切换产生可逆的构型转变,以调节马达的界面特性,如表面张力和润湿性。由于表面特性的改变而产生的局部界面张力梯度可以产生驱动力推动马达运动[9−10],这一驱动机理可归类为光诱导物理效应。如Abid等[11]制备了表面接枝偶氮苯的聚合物纳米马达,如图2(b)[11]所示,在特定波长照射下,偶氮苯分子发生顺反异构化,引起表面张力变化形成表面张力梯度,实现了马达在水溶液中的定向运动。一般来说,偶氮苯分子要么被接枝到颗粒表面,要么被纳入共聚物链中自组装成颗粒,以保证在高功率光照射下发生光异构化诱导的运动。然而,这种负载方式导致的低含量偶氮苯不能保证充分的光能−机械能转换,基于此Xiong等[12]报道了一种一锅式组装偶氮苯聚合物纳米马达的方法,如图2(c)[12]所示,所获得的马达不仅能够利用光异构化引起的颗粒变形促进其在溶液中的自推进,同时可利用紫外光照射的光热转化,为纳米马达提供动能。光致异构化驱动马达可通过光源的切换、光照角度和强度的调节,精确控制马达的启动、停止以及方向,同时通过设计不同的分子结构,可以实现复杂的运动模式,如周期性旋转、定向移动等。此外,许多光致异构化材料都具有生物相容性,因此在生物医学应用中有较好的前景。然而该类马达一般通过表面修饰,使得马达表面光敏物质含量较低,所以运动性能并不是十分出色,无法进行长时间持续的运动。其也存在光致疲劳现象,可能限制其在应用中的有效性和稳定性。
1.3 光催化分解
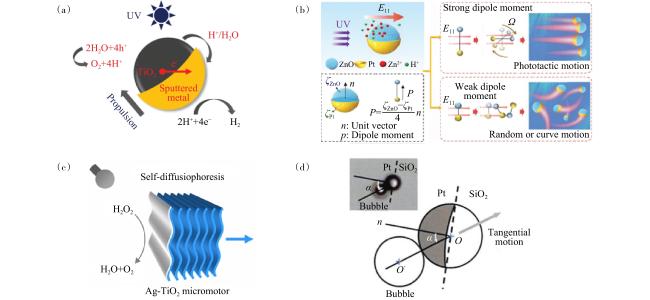
光催化分解是指光催化剂吸收光能后,电子从价带跃迁到导带,形成电子−空穴对,电子和空穴分别参与还原和氧化反应,生成新的产物(电解质或非电解质),从而改变局部物质浓度梯度[13]。光催化反应引起马达运动的常见机理包括自电泳、自扩散和气泡驱动。自电泳是由于电解质产物在溶液中最终以离子形式存在,而正负离子的扩散速度不同使溶液形成电梯度场,引发微纳马达运动。如Maric等[14]基于不同金属(Pt、Cu、Fe和Au)分别与TiO2构成微米马达,如图3(a)[14]所示,在紫外光作用下,电子和空穴分别在马达的金属侧和TiO2侧富集形成电场,金属与TiO2的电势差越大,马达的运动速度越大。但这类马达的显著缺点是仅能在短时间内表现出定向运动。He等[15]基于氧化锌和铂制备了一种紫外光驱动的ZnO/Pt微米马达,如图3(b)[15]所示,马达两侧的Zeta电位呈现出不均匀分布的特点,这种不对称性导致了电偶极子的形成。当这一由电荷分布不均产生的偶极子与入射光线方向平行时,它能够在光的激发下促使微马达启动,并维持一种持续且定向的移动模式。自扩散机理是基于微纳马达表面非电解质产物的非对称富集,这种富集形成了浓度梯度,进而通过扩散作用引发的流体运动来驱动微纳马达运动。如图3(c)[16]所示,Urso等[16]所设计的Ag−TiO2微米马达在0.1wt% 的H2O2溶液中,无论是否有紫外光存在,都能利用Ag对H2O2的高效催化性能,通过自扩散实现高速自主运动。气泡驱动是光催化反应过程中产生的气体分子产物浓度不断增加形成气泡,气泡生长、脱离甚至溃灭等过程与马达作用导致其运动。如图3(d)[17]所示,张静等[17]基于Pt和SiO2制备了一种中空微米马达,该马达在H2O2溶液中,Pt侧催化分解生成O2和H2O分子,O2气体分子聚集成核形成气泡从而推动马达运动,而气泡溃灭产生的微射流显著增加了马达的运动速度。自电泳、自扩散和气泡驱动的共同点在于都利用了化学反应或物理效应来产生驱动力,使微纳马达能够在流体中自主运动。自电泳基于电化学反应或电荷分布,自扩散基于浓度梯度和扩散力,而气泡驱动基于化学反应生成的气泡。此外,自电泳和自扩散驱动通常表现出较强的方向性,而气泡驱动的方向性则依赖于具体的设计和控制。在实际应用中,通过精心设计微纳马达的几何形状、材料特性及外部环境条件,可以有效地增强其方向性[18]。
2 光驱动微纳马达的分类及典型应用
根据光源特性,光驱动微纳马达主要可分为紫外光驱动、可见光驱动和近红外光驱动3类,不同光驱动微纳马达的应用前景和领域不同。
2.1 紫外光驱动微纳马达典型应用
紫外光能量高,与某些光敏材料可快速发生强烈相互作用,生成具有高度反应活性的自由基,加速有机污染物的降解。同时,其短波长可以准确聚焦,提供更精细的空间控制,减少对非目标区域的影响,提高操作精确性。因此,紫外光驱动微纳马达比较适用于水环境治理和目标货物输送领域[19]。
2.1.1 水环境治理
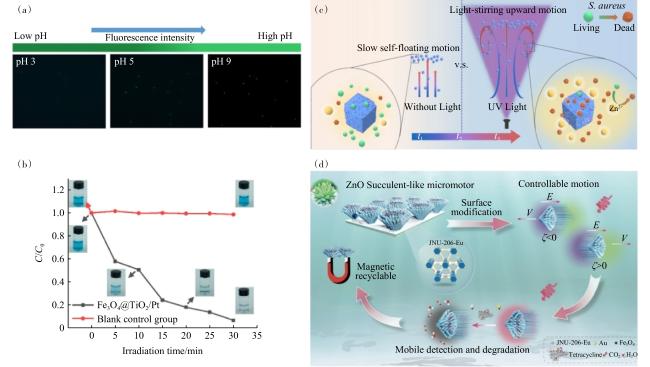
紫外光驱动微纳马达在水环境领域的应用包括水质监测和水质修复,如Debata等[20]设计了一种具有独特光学响应特性的微马达,这种马达在紫外光下能够可控运动,而在蓝光激发下可根据溶液pH值变化发射荧光信号。如图4(a)[20]所示,荧光信号的强度会随溶液的pH值变化而变化,通过这种清晰的视觉变化可直接反映溶液的局部pH值。2022年,Li等[21]制备了一种能被紫外光激发并可通过磁场控制方向的Fe3O4@TiO2/Pt微米马达。紫外光激发的自电泳机制保证马达实现了一系列的运动行为,包括加速、减速、启停。如图4(b)[21]所示,通过磁场调整马达运动方向,可实现30 min内定向光催化降解92.25%的甲基蓝污染物。不仅如此,在对有机染料进行光催化降解后,可通过磁铁回收微米马达,避免了二次污染。2023年,Huang等[22]基于金属−有机框架制备了PPy/ZIF−8微米马达。如图4(c)[22]所示,他们将这些光驱动马达应用于废水中金黄色葡萄球菌的去除,结果表明马达的快速运动引起的搅拌作用、金属有机骨架中Zn2+的释放以及马达上升运动过程中的物理捕获作用,使金黄色葡萄球菌的抑菌率高达98.89%。2024年,Fang等[23]成功设计并制备了一种类似多肉植物的ZnO/MOF/Fe3O4杂化微马达,如图4(d)[23]所示,该马达利用氧化锌的光催化活性和MOF的荧光响应特性,实现了在紫外光照射下四环素的高效动态荧光检测与光催化降解。同时,杂化微马达的磁性特性保证了其回收和再利用,确保了其在环境修复中的效率和可持续性。
2.1.2 目标货物输送
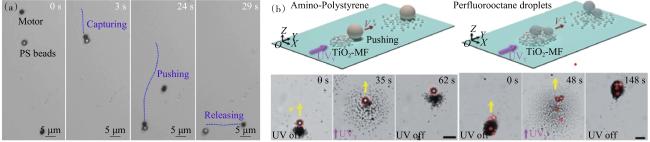
紫外光的高能量能够迅速激发光敏材料,产生足够的动力使马达启动或停止。同时,通过调整紫外光的方向,可以精确控制马达的运动方向,这使紫外光驱动微纳马达成为精准、可控和灵活的货物运输的理想工具。2021年,Jiang等[19]开发了一种由TiO2和多壁碳纳米管组成的刺猬形微米马达。在160 mW/cm2的紫外光照射下,这种马达依靠自电泳实现了快速的定向移动和聚集。同时马达表面的多壁碳纳米管提供了额外的吸附位点,使其能够吸附苯乙烯微球,实现货物的精准捕获。此外,如图5(a)[19]所示,通过调控紫外光的方向,可控制马达将货物从起始位置运输到目标位置,实现货物的精准投递,这为开发新型的微米级运输及递送系统提供了新的指引。然而,由于驱动力有限,单个马达通常难以运输比自身更大或更重的货物,为了提高马达的载货能力,Zhang等[24]设计了基于光趋性的TiO2微米马达,如图5(b)[24]所示,这些马达在紫外光照射下,通过自发的扩散电泳吸引聚集形成马达集群,可共同协作运输多个不同类型的大尺寸货物,到达预定地点后,所携带的货物可以通过特定方式从马达集群中卸载,从而实现货物的精准递送。
2.2 可见光驱动微纳马达典型应用
可见光是自然界中最易获取的能源之一,利用可见光驱动的微纳马达可不依靠特殊光源设备,在自然光照下即可发生光反应,因此极其适合户外大规模环境治理,如湖泊、河流中的污染物降解。此外,可见光对人体组织穿透能力适中,且对生物活性影响较小[25],因此也适用于生物医学领域。
2.2.1 水环境修复
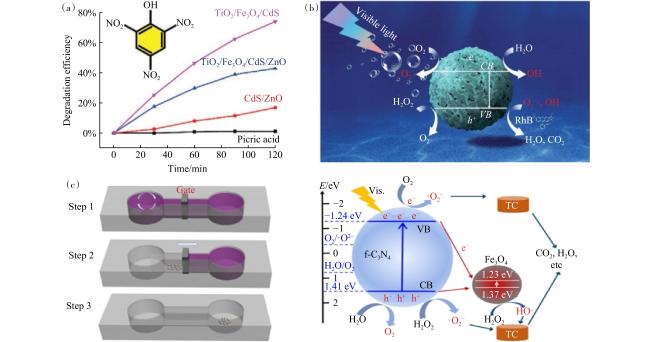
近年来,研究者们通过创新设计和优化材料,显著提升了可见光驱动微纳马达在水环境修复中的应用潜力。如2021年Ying等[26]设计了一种可六自由度运动的TiO2/Fe3O4/CdS微马达,在可见光照射下,马达展现出的优异运动特性显著增强了流体混合能力,同时在光作用下马达表面产生强氧化性自由基,如图6(a)[26]所示,使其降解水中苦味酸(高能炸药)的性能明显提升。为进一步提高马达的运动速度和污染物降解能力,2022年,Song等[27]制备了一种基于碳微球和石墨相氮化碳的可见光驱动微马达,如图6(b)[27]所示。这种微马达在含有30%过氧化氢的环境中,能够通过分解过氧化氢生成氧气气泡,在气泡驱动下马达与溶液快速混合,显著提高了罗丹明B的降解效率。针对复杂难降解的有机污染物,Feng等[28]从提升光催化性能的角度出发,开发了一种具有三维多孔结构的双模式驱动Fe3O4/f−C3N4微马达,如图6(c)[28]所示,该马达能够在可见光和磁场双重驱动下产生聚集行为,通过增加局部马达数量提高催化剂浓度,从而增强催化活性,实现了抗生素高效去除。
2.2.2 生物医学应用
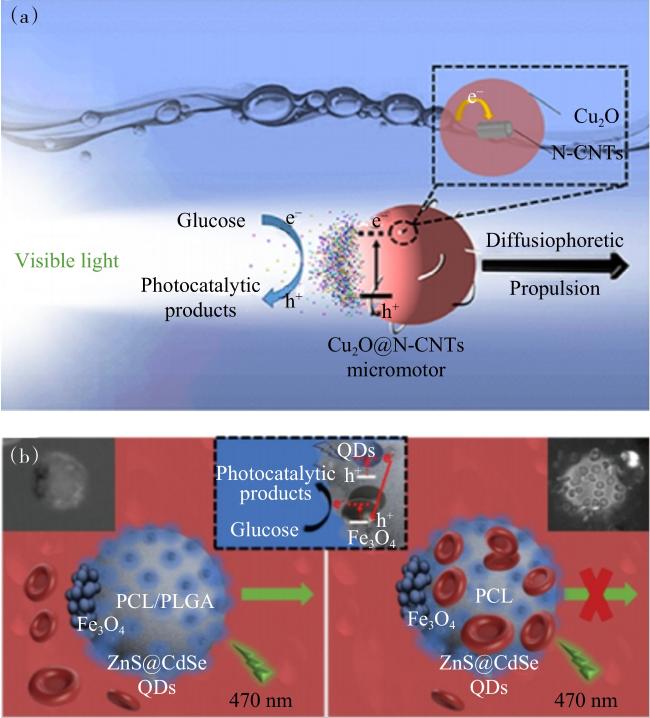
可见光驱动微纳马达应用于生物医学领域时,通常加入一些生物相容性燃料,利用光催化将燃料的化学能转化为马达的机械能,以提高马达运动能力[29]。如图7(a)[30]所示,Wang等[30]制备了一种以葡萄糖为燃料的Cu2O@N−CNT微马达,在可见光下,该马达的运动速度可达18.71 μm/s,几乎与传统的基于Pt−H2O2体系的微马达相当。同时马达的运动速度可以通过调整N−CNT含量、葡萄糖浓度、光强度等多种方法进行有效调节。这也是使用光催化将葡萄糖的化学能转化为微马达机械能的首次报道,为未来生物医学的实际应用奠定了基础。2021年,Pacheco等[31]利用可降解聚合物聚己内酯(PCL)和聚乳酸−羟基乙酸(PLGA),制备了一种由CdSe@ZnS量子点作为光活性材料,并负载不对称Fe3O4纳米颗粒的微马达,如图7(b)[31]所示。该马达通过分解葡萄糖实现自扩散泳推进,其表面的PLGA层可以有效防止红细胞和蛋白质的吸附,不仅能够有效避免生物污染,而且提高了微马达的运动速度。实验表明,在40 min内,这种微马达能够去除85%的与败血症相关的Escherichia coli O111毒素以及80%的银环蛇毒素,相较于没有PLGA涂层的微马达,其毒素清除效果更为显著。此外,微米马达与活细胞之间的高生物相容性特征也得到了证明,几乎无毒性并且溶血率极低。
2.2.3 目标货物运输
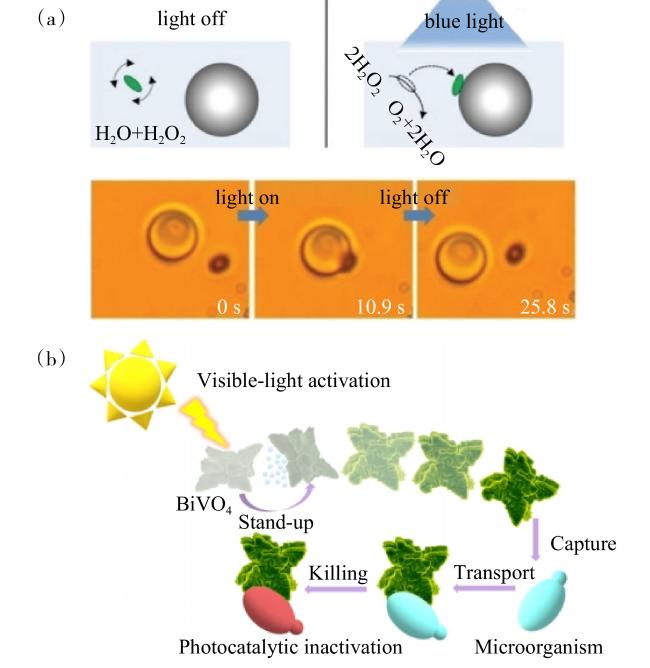
可见光在目标货物输送方面同样展示出良好的应用前景[32],如Martinez等[33]探究了利用外部旋转磁场驱动的微马达在运输微观货物方面的特性。他们发现,该马达在蓝光作用下,可通过水中的过氧化氢分解可逆地结合胶体货物,实现货物在任意位置的拾取、运输和释放,如图8(a)[33]所示。同时,可根据需求改变磁场,来改变马达和货物之间的相对位置,使货物输送的拖拽模式从推动变为拉动,展现了马达输送货物的多功能性。然而其所需的过氧化氢量可能影响其生物相容性应用。基于此,Villa等[34]制备了单组分BiVO4微米马达,这些微米马达在可见光照射下能够在纯水中和含有极低过氧化氢浓度(0.01wt%)的水溶液中自主推进,同时在没有表面功能化的情况下也可完成颗粒装载和运输。如图8(b)[34]所示,这些马达在光激活下表现出寻找和黏附酵母细胞壁的能力,并可通过控制光源开关来控制其附着和释放。
2.3 近红外光驱动微纳马达典型应用
近红外光因其在材料中良好的吸收特性和高效的光热转换能力,成为驱动微纳马达的理想光源。近红外光的生物组织穿透性强、光毒性低、具有高度生物相容性和安全性,因此近红外光驱动微纳马达特别适合于生物医学领域,如体内微环境监测和精准药物递送等应用[35]。
2.3.1 生物医学检测
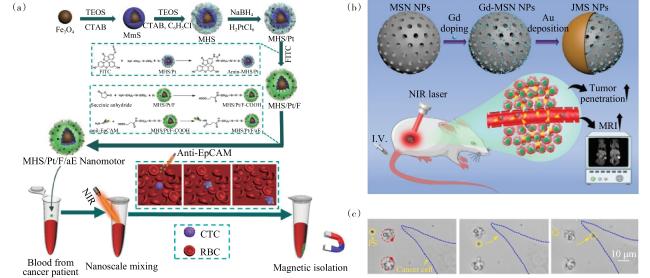
通过在微纳马达表面附着荧光物质,并利用近红外光的激发,可以促使这些马达发射出可见光谱内的荧光或更高频率的光辐射,这一特性使微纳马达成为生物标记与细胞成像领域的重要工具。当与光镊技术结合时,微纳马达能实现对单个细胞甚至分子级别的精准操控,在肿瘤细胞的高精度检测方面表现出显著优势。2020年,Xu等[36]开发了一种近红外光驱动的荧光纳米马达,用于检测人体血液中的肿瘤细胞(CTCs)。如图9(a)[36]所示,这种马达在近红外光照射下持续运动,显著增加了与CTCs的接触概率,使捕获效率从无NIR照射时的67.5%~85%提高到了93.75%~98.75%,为复杂血液环境中检测肿瘤细胞提供了新途径。2021年,Zheng等[37]开发了一种近红外光驱动的Janus多孔硅纳米马达,用于增强体内肿瘤组织的磁共振成像(MRI)。这种马达表面沉积了金层,在近红外光照射下通过光热效应实现自主运动,能够主动接近并穿透肿瘤细胞,提高细胞摄取量,并显著增强MRI对比度。如图9(b)[37]所示,小鼠体内研究表明,经过NIR照射后,肿瘤区域的MRI信号强度比未照射组增强了1.73倍。为了同时实现检测与治疗双重作用,2022年,Zhao等[38]提出了一种掺杂镧系元素的上转换荧光微马达。这种马达不仅能通过测量上转换荧光光谱来确定细胞温度,而且相对灵敏度可达(0.53%~0.68%)· K−1。如图9(c)[38]所示,该马达在近红外光驱动下可导致局部流体流动,将聚苯乙烯微粒和负载有阿霉素的介孔二氧化硅纳米颗粒递送到癌细胞附近。这种将温度传感和药物递送集成到一个微马达的设计为精准医疗提供了一种创新工具。
2.3.2 光热治疗
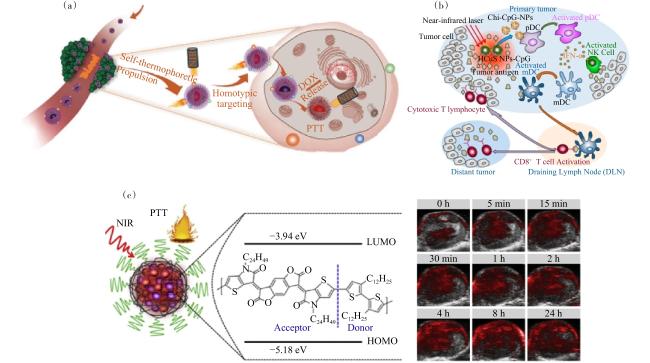
光热疗法是利用具有优异光热转换性能的材料,将其注入机体内部并使其聚集在肿瘤组织附近,将外部光源的能量转化为热能来杀死癌细胞的一种方法[39]。2020年,Zhou等[40]开发了一种近红外光驱动的仿生纳米马达。如图10(a)[40]所示,该马达负载了抗癌药物阿霉素,在近红外光下,马达内部的碳芯产生热量,形成温度梯度推动马达运动。马达外部覆盖了一层仿生膜,这层膜不仅能降低生物体内的黏附,还能赋予马达高度特异性的自我识别能力,确保马达将药物精准运送到癌细胞,展现了在癌症治疗中的巨大潜力。在光热治疗的基础上,实现联合治疗是一种更为有效的方式。Guo等[41]联合光热和免疫疗法,制备了壳聚糖包覆的空心铜硫化物纳米马达,并在其表面组装免疫佐剂。结果表明,在红外光激发下,纳米马达产生的光热效应引发肿瘤细胞死亡,减少肿瘤生长并释放肿瘤抗原,而免疫佐剂增强了宿主的抗肿瘤免疫力。如图10(b)[41]所示,该方法比单独的免疫疗法或光热疗法更为有效。同时,空心CuS纳米粒子具有生物可降解性,可在光激发后从体内消除。光热疗法与化学药物治疗相结合虽显示出良好的前景,但也存在治疗剂渗透率低、光热治疗不均匀等局限性。2022年,Liu等[42]合成了一种近红外光驱动的核桃状聚多巴胺(PDA)纳米马达。如图10(c)[42]所示,通过对马达表面修饰甲氧基聚乙二醇胺(mPEG−NH2)提高其水溶性,并在马达上负载阿霉素。实验结果表明,所制备的PDA纳米马达具有良好的生物相容性和光热效应。在近红外光照射下,马达获得自主运动能力,促进药物释放,提高药物渗透的均匀性和治疗效果。
2.4 光驱动微纳马达的应用分析
不同光驱动的微纳马达因其特有的光源和材料响应性,在不同领域既展现了独特的应用潜力,同时在若干交汇领域亦能各展所长。如紫外光和可见光驱动的微纳马达在水污染治理中均依赖其光催化特性,通过产生电子−空穴对实现水中有机污染物的降解。两者的主要区别在于紫外光驱动微纳马达利用紫外光的高能量,能够更高效地产生电子−空穴对,具有显著的有机污染物降解能力,但紫外光在水中的穿透能力有限,可能限制深层水域的应用,同时紫外光需要昂贵且复杂的光源设备。可见光驱动微纳马达利用更易获取的可见光,但其能量较低,通常需要通过材料的优化设计提升光催化效率。总体而言,在实际应用中,应根据具体需求选择最合适的驱动方式或探索多光谱响应材料,以结合不同光源的优势。
可见光和近红外光驱动微纳马达在生物医学应用方面各有优势但又存在一定的差异。可见光驱动微纳马达通常通过分解生物相容性燃料,产生气泡推动马达前进,这种方式具有较好的生物相容性和马达运动速度,但受限于可见光的穿透深度和能量密度,一般适用于浅表组织或体外应用。而近红外光驱动微纳马达通常利用光热转换产生温度梯度推动马达前进,近红外光具有深层组织穿透能力和低生物组织吸收特性,同时近红外光可以辅助光热治疗,因此这种马达适用于体内深层组织的肿瘤细胞捕获、成像和治疗等应用,但近红外光源相对昂贵,可能增加治疗成本。同时高光热转换效率对马达组成材料提出了更高要求,且大多数情况下温度梯度驱动的马达运动速度低于气泡驱动的速度。
3 光驱动微纳马达的局限性及未来发展趋势
光驱动微纳马达作为前沿科技的研究热点,在多个领域展现出了巨大的潜力与广阔的应用前景。尽管近年来光驱动微纳马达的研究取得了显著的突破,但仍存在一些亟待解决的瓶颈。
3.1 光驱动微纳马达的局限性
3.1.1 能量转换效率低
光驱动微纳马达的运动依赖于光能到机械能的转换。然而,可见光和红外光的能量密度相对较低,而紫外光的穿透力有限,这些因素都可能限制微纳马达的运动性能。此外,能量损失是不可避免的,在微纳尺度上,马达与光的相互作用减弱,难以克服随机的布朗运动,导致能量转换效率进一步降低。
3.1.2 光源强度问题
当近红外光源强度不足时,微纳马达无法获取足够的能量,导致运动速度和效率降低,从而影响其实际应用。而过强的光源会引发显著的光热效应,导致局部温度显著升高,在生物医学应用中,这种局部温升可能对正常生物组织造成热损伤,影响其正常功能。
3.1.3 环境介质影响
光驱动微纳马达的性能在不同环境介质中会受到黏度、化学成分和离子强度的显著影响。例如,在高黏度介质中,微纳马达的运动速度会显著降低;而在高离子强度的环境下,其推进效率也会受到影响而减弱。这些不利条件会直接导致微纳马达的响应时间延长,运动轨迹变得不规则和难以预测,进而严重制约它们在复杂生物流体以及高黏度介质中的实际应用。
3.1.4 材料选择问题
一些高效的光敏材料因具有生物毒性,限制了它们在生物医学领域的应用。例如,虽然金纳米颗粒具有优异的光转换效率,但其生物毒性使其在体内应用中存在风险。此外,某些材料在特定环境条件下不够稳定,可能会降解并导致性能衰减。例如,二氧化钛在长时间紫外光照射下,催化活性会下降,从而影响微纳马达的持久性能[43]。
3.2 光驱动微纳马达未来发展趋势
展望未来,光驱动微纳马达的研究聚焦于以下几个方向:(1) 提高能量转换效率。开发新材料和结构,以提高光能到机械能的转换效率,减少能量损耗,尤其是要克服微纳尺度上的能量转换难题,提升在低光强环境下的马达运动性能。(2) 增强环境适应性。未来的微纳马达将被设计得更加适应不同的环境介质,包括降低对黏度和离子强度的敏感性[44],确保在复杂生物流体中也能保持稳定的性能。(3) 提高生物相容性。开发新型的光敏材料,既能高效转换光能,又能避免生物毒性,以确保微纳马达在生物医学应用中的安全性和长期稳定性。(4) 多源驱动方式的融合。通过结合不同驱动机制,如光驱动与磁驱动或电场驱动的结合,以满足复杂环境和多样化应用的需求。(5) 集成多功能性。未来的微纳马达将不仅仅是简单的运输工具,还将集成诊断、治疗、传感等多种功能,成为一个真正的智能纳米机器人,以满足复杂任务的需求[45−46]。
总之,随着材料科学、纳米技术和光控技术的不断发展,光驱动微纳马达将在健康监测、生物医疗和环境感知等领域带来革命性的变革。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}