


21世纪以来,全球海洋油气勘探开发步伐加快,越来越多人将目光聚焦于潜在资源丰富的深水海域[1-2]。位于中国深水海域的陵水17-2气田(水深1220~1560 m),是千亿立方米优质高产大气田,该气田的顺利开发将推动中国海洋油气勘探开发全面进入超深水时代。其中,“深海一号”半潜平台是该气田开发的关键设施。由于目前国内大多数船厂的船坞和出港航道水深均不超过9 m,这给空船质量达到5万t的“深海一号”出港之行设置了难题,这也是中国深水浮式生产平台建造不得不克服的技术难题[3]。为解决这一问题,“深海一号”半潜平台突破浮筒宽高比不大于2的工业界常规做法,将浮筒的宽高比提升为2.33,以保证该类型半潜平台顺利出航。但这一扁胖浮筒的设计,导致平台在拖航作业时受到了更大的波浪载荷作用,从而加剧了平台运动的幅度,对拖带系统产生更大的张力,严重影响了新型半潜平台拖航作业的稳定性和安全性[4]。此外,半潜平台拖航航线中的台湾海峡,因为风高浪急且存在浅水航道,长期以来都是海洋工程界公认的拖航高难度海域,这也是“深海一号”航途中的“第二道门槛”。如何确保新型半潜平台安全通过这一航道,已成为不得不解决的重要挑战。
为保证拖航作业安全,国内外科研人员开展了大量研究。1958年,Strandhagen等[5]基于线性理论对拖航系统稳定性影响因素进行研究。Desroches[6]通过水池试验对拖航系统缆绳张力进行研究,结果表明拖航作业安全性需要同时考虑平均拖缆张力和峰值动态张力。Park等[7]通过进行一系列湿拖沉箱模型试验,评估沉箱在静水和顶海条件下的稳定性和有效动力需求。Chen等[8]建立了考虑风、浪、流等复杂环境载荷下的拖船6自由度模型,通过数值模拟对平台拖航运动响应进行分析。Zhang等[9]基于三维势流理论研究了吃水深度、拖航速度对浮式风力机运动响应的影响,表明减小吃水、增加航速都会降低拖航稳定性。Han等[10]考虑多艘拖船、被拖船与浮冰的耦合运动,建立了破碎冰区拖船拖航过程中的数值模拟方法,通过数值算例讨论了冰厚、冰密度和浮冰大小等冰特性的影响。Paulauskas等[11]通过数值模拟对近海港口海域的拖船缆绳张力进行研究,指出近海港口航道水深、宽度对拖带缆绳张力影响较大。Le等[12]设计了质量相近、重心相同的3浮筒和4浮筒式浮式风力机,对比分析了两者在深海海域环境条件下不同波浪高度、波浪周期对平台运动响应的影响。Gu等[13]通过模型试验和数值模拟相结合的方式,研究了南海海域环境条件下波浪高度、拖航速度对沉箱运动响应的影响,表明大型结构物垂荡运动受波浪高度及拖航速度的影响较大。
目前,海洋平台拖航研究中作业海域大多为沿海开阔海域,水深较深,而台湾海峡不仅环境复杂恶劣且水深较浅,导致平台存在触底风险,对拖航作业安全构成威胁。因此,以浮筒宽高比值较大的新型半潜平台为研究对象,在通过数值模拟得到波浪高度、谱峰周期及浪向角对平台拖航运动响应和拖揽张力影响的基础上,探究不同拖航速度、拖揽长度下平台运动响应和拖揽张力变化规律,旨在为超大型半潜平台湿拖过台湾海峡提供施工与避险参考。
1 半潜平台基本参数

表1 半潜平台主要参数 |
| 指标 | 参数 | 指标 | 参数 | |
| 总长/m | 91.5 | 浮筒长/m | 49.5 | |
| 吃水/m | 15 | 浮筒宽/m | 21 | |
| 质量/t | 65363 | 浮筒高/m | 9 | |
| 立柱高/m | 59 | 惯性半径R-xx/m | 38.69 | |
| 立柱宽/m | 21 | 惯性半径R-yy/m | 41.42 | |
| 立柱中心间距/m | 70.5 | 惯性半径R-zz/m | 42.55 |
表2 拖带系统主要参数 |
| 拖揽揽号 | 长度/m | 直径/m | 湿重/(kg·m-1) | 破断张力/MN |
| 主拖揽 | 603.8 | 0.104 | 37.4 | 6.36 |
| 主拖分揽 | 52.0 | 0.092 | 29.3 | 5.84 |
| 辅拖揽 | 650.0 | 0.082 | 23.3 | 4.63 |
运用水动力软件SESAM对不同环境工况下的拖航系统进行时域耦合分析,通过施加恒定的系柱拉力以保持4节拖航速度,设置模拟仿真时长3 h,结果分析去除仿真前1000 s数据以消除拖航启动阶段瞬态效应误差。
2 研究方法
2.1 耦合时域运动方程
波浪中的结构物通常被认为是刚性的浮体,拖航系统在风、浪、流联合作用下的时域运动方程为:
式中,M为平台质量;A为附加质量;D为阻尼;K为刚度,F为外载荷。
2.2 浅水波浪理论
当海域水深较浅、波长大于水深时,波浪运动受到海底效应影响,此时波浪适用于椭圆余弦波理论。
海底到波谷高度:
海域到波峰距离:
式中,h为水底到水面距离,H为波峰至水面距离,cn为椭圆余弦函数,λ为波长,K(k)、E(k)为线性波和孤立波完全椭圆积分,k为椭圆积分模数,T为波周期,t, x为计算点的时间和位置坐标。
2.3 波浪载荷
进行水动力计算时,平台浮筒及立柱采用三维势流理论[15]。海水介质被假定为均质、不可压缩、无旋势、非黏性的理想流体。利用三维势流理论计算波浪对拖航系统的耦合效应的关键点是求解流场中的速度势,包括速度势的分解及其求解条件。流场中的总速度势Φ(x, y, z, t)由入射速度势、辐射速度势和衍射速度势组成:
式中,Φ(I x, y, z, t)为入射速度势,Φ(R x, y, z, t)为辐射速度势,Φ(D x, y, z, t)为衍射速度势。
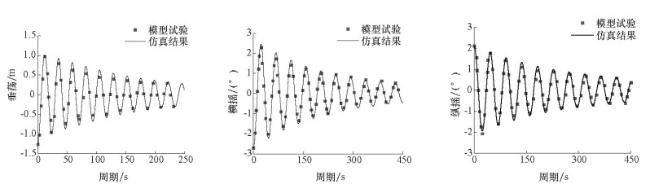
2.4 模型验证
2.5 运动性能分析
3 工况设定
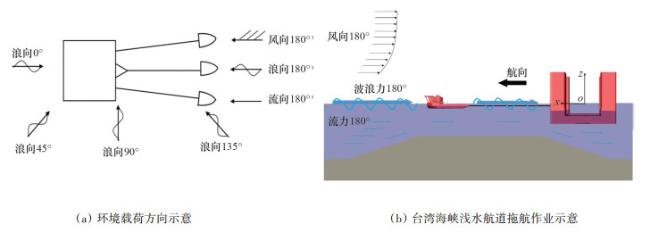
浅水是个相对概念,同一水深对于小船可能是深水,对于大船则是浅水,其定义与船舶吃水深度相关。国际上采用水深吃水比(水深/吃水)对此定义,其中浅水海域为1.2<水深/吃水≤1.5。本研究海域为中国南海台湾海峡附近海域。根据文献[18],考虑到平台吃水15 m且台湾海峡最浅水深为20.8 m,初步设计的环境水深为22 m。另外,通过设定相同风、流环境条件下不同的有义波高、谱峰周期和浪向角,研究浅水海域不规则波浪载荷对浮筒宽高比过大的新型半潜平台拖航运动响应及拖揽张力的影响。考虑到台湾海峡风急浪高[19],初步设计的环境条件:波浪载荷选择JONSWAP谱,设置有义波高为3、4、5 m,谱峰周期为9.4、10.5、11.6 s,浪向角为0°~180°,每隔45°取一个工况进行计算;风载荷选择API风谱(平均风速20 m/s),流载荷设置为表面流速1.0 m/s,风载荷、流载荷方向相同均取为180°(顶风、顶流),环境载荷方向与台湾海峡浅水航道拖航作业如图 4所示。
4 数值结果分析
4.1 波浪高度影响分析
通过设置不同的有义波高,研究波浪高度对半潜平台湿拖作业运动响应和拖揽张力的影响规律。由于平台处于拖航状态,运动响应主要分析垂荡、横摇和纵摇,拖揽张力以主拖揽张力为代表。环境工程设置如表 4所示。
表4 环境工况参数 |
| 工况 | 有义波高/m | 谱峰周期/s | 浪向角/(°) |
| C1 | 3.0 | 9.4 | 0.0 |
| C2 | 4.0 | 9.4 | 0.0 |
| C3 | 5.0 | 9.4 | 0.0 |
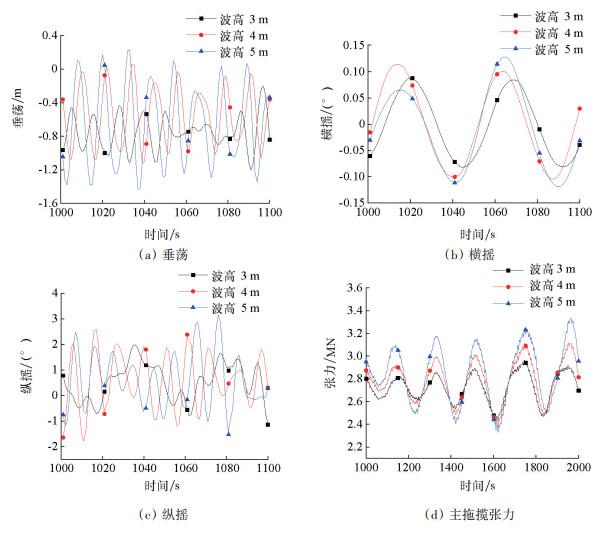
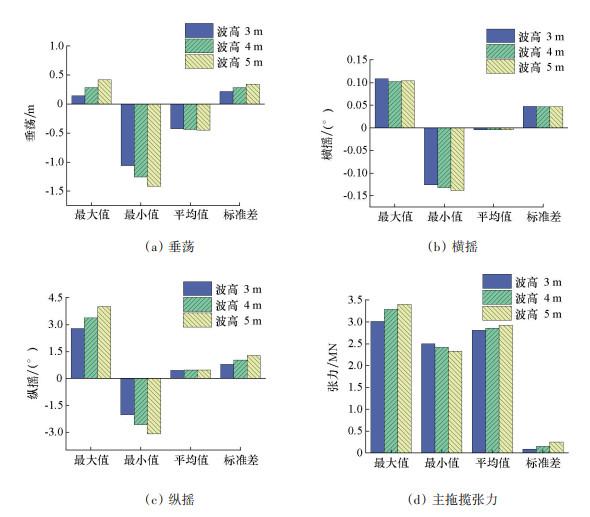
波浪高度的大小象征着海浪能量的大小,更大的波浪会引起更大的波浪力矩,导致平台受到更强的波浪冲击和推动,进而增大了平台垂荡和纵摇的运动幅值。另外,主拖揽张力幅值增幅较为微弱是因为平台在顺浪拖航的情况下,波浪的传播方向与航向一致,波浪对平台产生助推力,从而减小了拖揽张力的波动。横摇幅值变化极小是因为半潜平台质量较高且主体结构为对称设计,0°浪向角下的波浪对平台的侧向力相对均匀地作用在两侧,从而不会引起明显的横摇运动。
4.2 波浪周期影响分析
通过设置不同的谱峰周期,研究其影响规律。环境工程设置如表 5所示。
表5 环境工况参数 |
| 工况 | 有义波高/m | 谱峰周期/s | 浪向角/(°) |
| C3 | 5.0 | 9.4 | 0.0 |
| C4 | 5.0 | 10.5 | 0.0 |
| C5 | 5.0 | 11.6 | 0.0 |
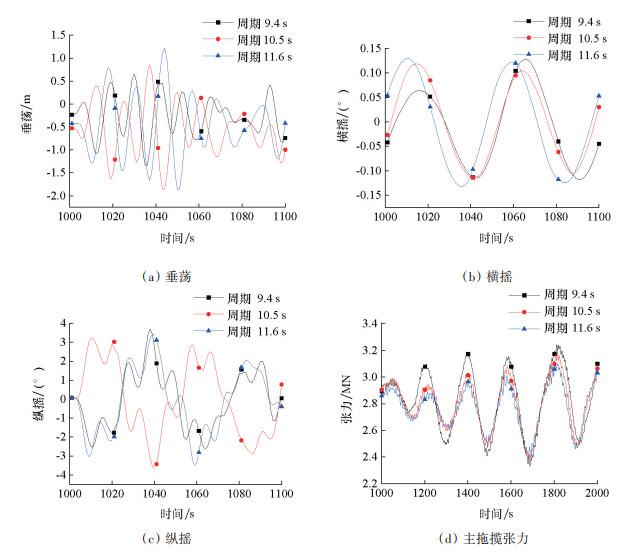
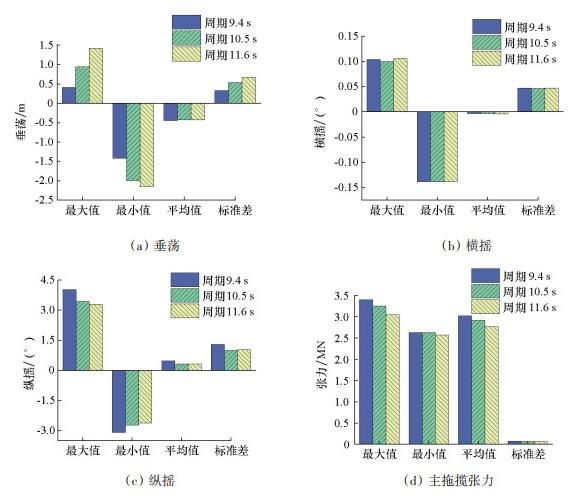
当波浪周期与平台自身固有周期接近时,结构会在相应的自由度产生共振,所以当谱峰周期逐渐增大,逐渐接近平台固有周期时,平台垂荡会不断增大。另一方面,随着波浪谱峰周期的增大,波浪力矩对平台的运动影响减小,因此纵摇和主拖揽张力幅值均逐渐减小。
4.3 浪向角影响分析
通过设置不同的浪向角,研究其影响规律。环境工程设置如表 6所示。
表6 环境工况参数 |
| 工况 | 有义波高/m | 谱峰周期/s | 浪向角/(°) |
| C5 | 5.0 | 11.6 | 0 |
| C6 | 5.0 | 11.6 | 45.0 |
| C7 | 5.0 | 11.6 | 90.0 |
| C8 | 5.0 | 11.6 | 135.0 |
| C9 | 5.0 | 11.6 | 180.0 |
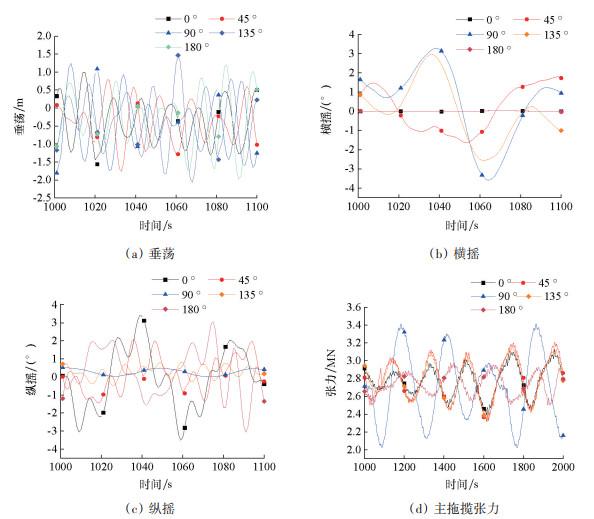
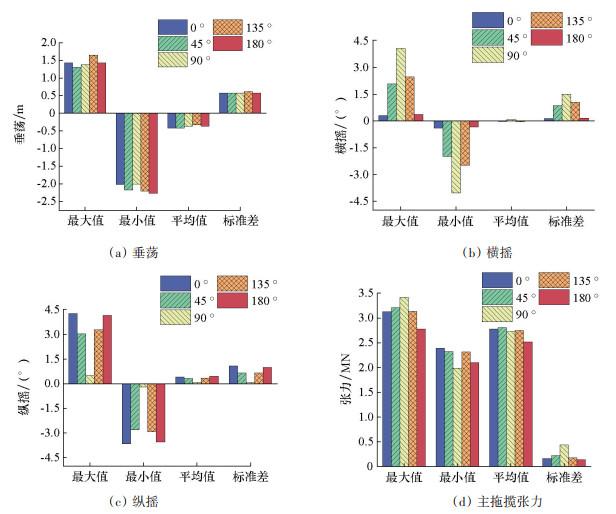
需要注意的是,虽然纵、横摇运动幅值满足拖航过程规定的结构物倾角位移≤5°的要求,然而由于平台垂荡较大,计算得到平台最大吃水约为20.6 m,临近台湾海峡最浅水深20.8 m,因此在实际拖航作业中平台存在触底风险。另外,拖缆在拖航作业中受到的载荷响应应不超过其破断载荷的50%[21]。而在浪向角为90°海况下,主拖揽张力极值已经超过50%拖揽破断力(6.36 MN),因此存在作业安全隐患。
4.4 拖航速度、拖揽长度影响分析
基于以上研究,发现当半潜平台拖航系统以4节航速在波高5 m时的台湾海峡浅水航道拖航时,存在触底风险和缆绳断裂安全隐患。因此,需要采取有效措施来规避风险,例如控制拖航速度、拖缆长度等。以工况C7为对照组,研究降低拖航速度为3节、2节和延长、缩短拖揽长度1/3对平台运动响应和拖揽张力的影响(表 7)。
表7 工况参数 |
| 工况 | 有义波高/m | 谱峰周期/s | 浪向角/(°) | 拖航速度/节 | 主拖缆长度/m |
| C7 | 5.0 | 11.6 | 90.0 | 4.0 | 603.8 |
| C10 | 5.0 | 11.6 | 90.0 | 3.0 | 603.8 |
| C11 | 5.0 | 11.6 | 90.0 | 2.0 | 603.8 |
| C12 | 5.0 | 11.6 | 90.0 | 4.0 | 805.0 |
| C13 | 5.0 | 11.6 | 90.0 | 4.0 | 402.5 |
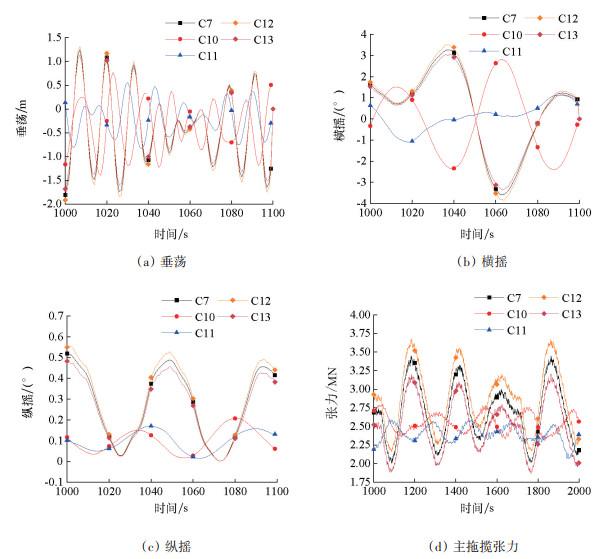
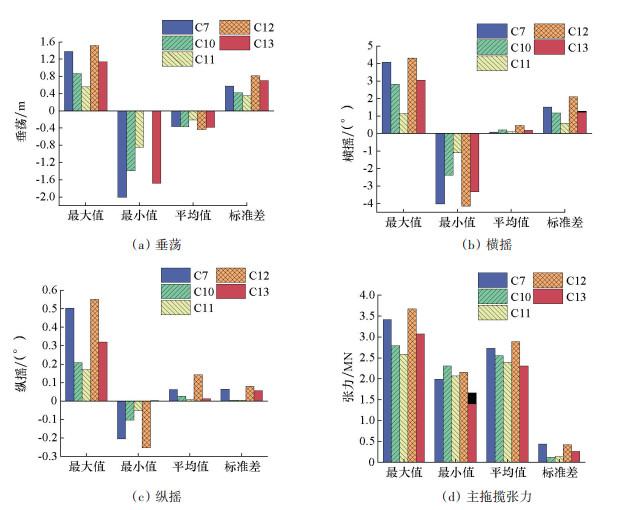
综上所述,在新型半潜平台拖航作业遭遇浅水航道和危险海况时,可以通过降低拖航速度和缩短拖揽长度的方式提高平台稳定性,保障作业安全。
5 结论
为保障新型半潜平台在台湾海峡拖航作业的安全性,基于时域分析理论、浅水波浪理论和三维势流理论,构建拖航系统数值仿真模型,研究了浅水中不同波浪条件对平台拖航运动响应和拖揽张力的影响,主要结论如下。(1)波浪载荷因素中,波浪高度和谱峰周期对平台垂荡、纵摇和拖揽张力影响较大,浪向角对横纵摇和拖揽张力均有较大影响。波浪高度越高,平台垂荡、缆绳张力越大;谱峰周期越长,平台纵摇、缆绳张力越小;不同浪向角下运动响应极值变化呈凹凸型分布。(2)在平台拖航过程中,不同工况下的半潜平台横纵摇均≤5°,满足拖航规范对大型海洋结构物的拖航要求,然而在台湾海峡浅水航道拖航时平台存在触底风险;通过分析不同航速下平台最大吃水,得出台湾海峡极端海况下半潜平台拖航速度为2、3、4节时,安全水深分别为25、28、31 m。(3)在90°浪向角下,半潜平台拖带缆绳载荷极值超过缆绳拖带作业安全范围,存在断裂隐患,可以通过降低拖航速度、缩短拖揽长度等方式规避风险,保障作业安全。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}